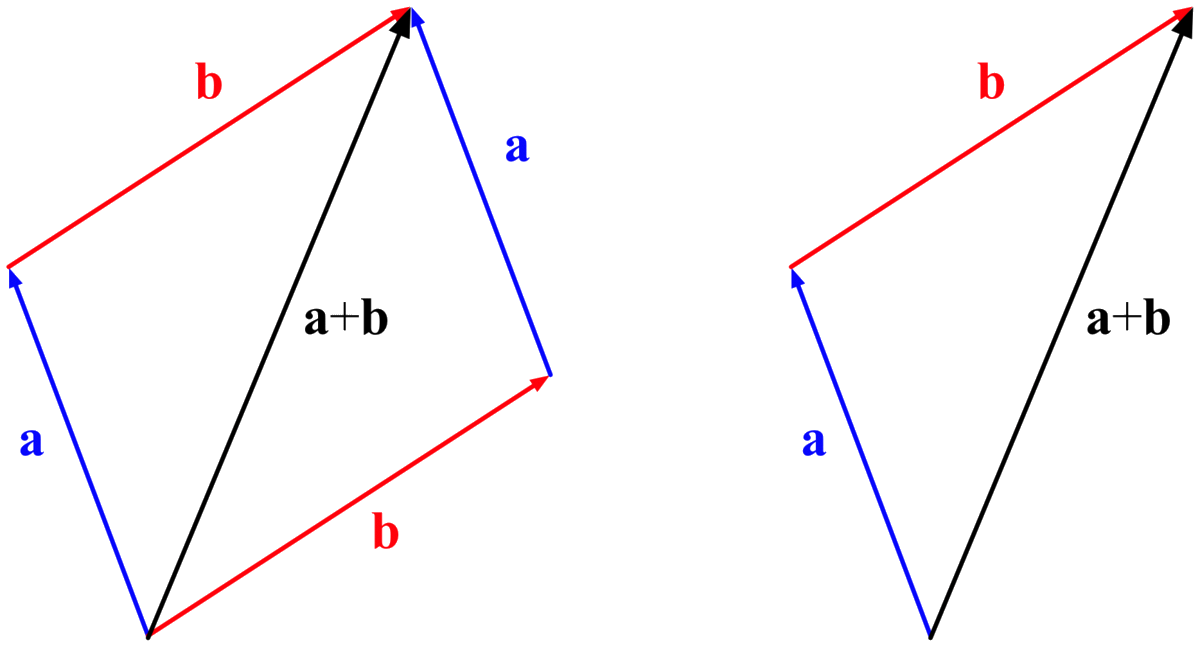
Vector addition can be done either by using the parallelogram rule, either by using the polygon rule...
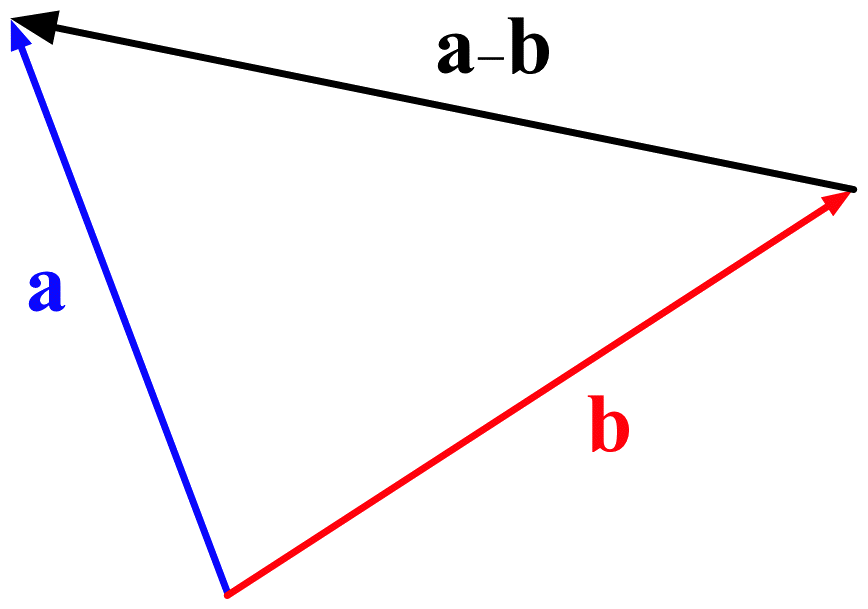
...and the subtraction can be done this way:
In mathematics, physics
and engineering, a Euclidean vector (sometimes called a space vector)
is a geometric object that has dimension
(length), trajectory and direction. Vectors can be added to other vectors
according to vector algebra.
Vector addition can be done either by using the parallelogram rule, either by using the polygon rule...
...and the subtraction can be done this way:
Statics is the branch of mechanics that studies bodies at rest and forces in equilibrium. Static equilibrium is a physical state in which the net force passing through the system is zero and the components of the system are at rest.
The material point is a physical model used to represent a body whose dimensions are neglected, but whose other physical properties are taken into account.
Motion represents the displacement of the position of a body in relation to a reference (body considered fixed).
Trajectory is a line described by the body during its movement.
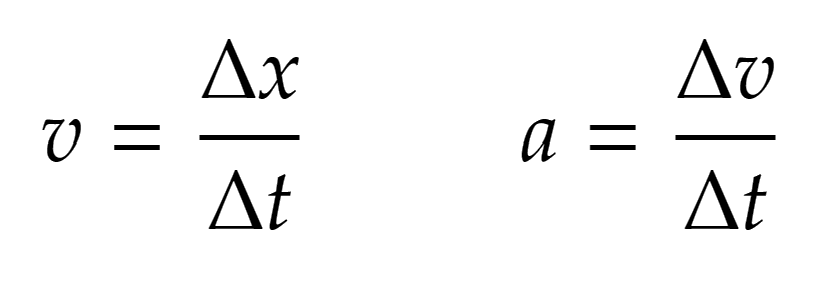
The formulas for calculating velocity and acceleration are:
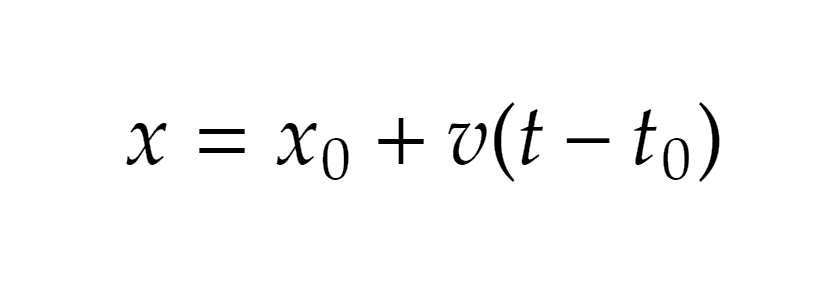
Uniform rectiliniear motion involves moving a body with constant velocity along a straight line trajectory. The law of uniform rectilinear motion is:
Uniformly varied rectilinear motion involves the motion of a body with constant acceleration (variable velocity) on a straight line trajectory. The velocity law of uniformly varied motion is:
Law of uniformly varied motion:
Galilei's law: 
The principle of inertia states that any body continues to mantain its state of uniform rectilinear motion or rest as long as no other body/force acts on it to change this state.
Inertia is the general physical property of bodies that makes them resist changes when in state of motion or rest.
Mass is the physical size that ensures the inertia of a body.
The inertial reference system is a reference system in which the principle of inertia is valid. An inertial reference system is either at rest or in uniform rectilinear motion.
The fundamental principle states that the force vector is equal to the product of the mass of the body and the acceleration vector.
Force is the physical quantity that measures the interaction between bodies.
Interaction is a general physical property of bodies acting on each other.
The weight of a body can therefore be calculated by the formula:
If one body acts on another body with a force called action, the second body also acts on the first body with a force equal in mode, in the same direction and in the opposite direction, called reaction.
Comments:
If several forces act simultaneously on a body, each will produce its own acceleration, independent of the others, the resulting acceleration being the vector sum of the individual accelerations.
Frictional force is a force that occurs whenever a body is on the surface of another body, caused by the interlocking of irregularities between the surfaces of the bodies.
It opposes the direction of motion of the bodies, is tangential to the contact surface and is applied at the very centre of the contact surface.
The laws of friction consist in the statement that the friction force does not dpend on the area of the contact surface and is directly proportional to the normal pressing force on the plane (normal reaction)
If a body acts on an elastic spring with a force called a deforming force, then the elastic spring also acts on that body with a force equal in modulus, in the same direction and in the opposite direction, called an elastic force.
Work is the physical quantity equal to the scalar product of the force vector and the displacement vector (the displacement vector is a physical process quantity).

The dimensionless ratio of useful mechanical work to consumed mechanical work is called efficiency. Efficiency is alwayssubunit.
Mechanical power is the physical quantity numerically equal to the mechanical work done in a unit of time.
Mechanical energy is the physical state size that characterizes the ability of a mechanical body/system to perform mechanical work at a given time.
a) Kinetic energy is characteristic of those bodies moving at a certain speed relative to a reference point. The variation of the kinetic energy of a body is equal to the mechanical work done by all the forces acting on the body.
b) Potential energy is characteristic of those bodies on which conservative forces (weight, elastic force) act.

The law of conservation of mechanical energy: if only conservative forces act on a body, its mechanical energy is conserved (constant).
The mechanical energy variation theorem: if both conservative and non-conservative forces act on a body, the variation of its mechanical energy is equal to the mechanical work done by the non-conservative forces.
The momentum of a body is a physical quantity defined as the product of mass and velocity. Another (older) term is that given by Newton, who defined momentum as a quantity of motion.

The mechanical momentum variation theorem of a material point is
 .
.
If the force vector is zero, then the variation of the mechanical impulse is also zero so the initial impulse is equal to the final one, we say that the mechanical impulse of the material point is conserved.
a)plastic collision: after collision, the bodies stay together
b)perfectly elastic collision: after the collision, the bodies move independently
Mechanical oscillation is the motion of a body that is repeated on either side of an equilibrium position.
1) The period is the time interval in which a complete oscillation takes place:
2) Frequency is the number of oscillations performed in a unit of time:
3) Elongation is the distance the body is from its equilibrium position at a given moment.
4) Amplitude is the maximum elongation.
Harmonic oscillations can be either damped (amplitude decreases over time) or undamped (amplitude is constant over time).
The linear harmonic oscillator is a material point that performs an oscillatory motion under the action of an elastic force. The laws of motion, velocity and acceleration are:
